Editor: External Force Torque Software
Description
When using many of the flight software modules and flight software chains, often the examples use a reaction wheel array to adjust the dynamics of the spacecraft to orient a pointing vector to align with a reference frame. However, for simple simulations, to avoid calculating the mathematics behind the reaction wheel physics and friction models, an external force torque module can be added instead. The model gives a simple force torque to the spacecraft as an external body frame \(B\) torque and can be used as a direct replacement for the flight software chain. This operator guide demonstrates how to replace a reaction wheel array with a torque while maintaining functionality.
Flight Software Chain
It is assumed that a flight software chain has been added to a spacecraft with a reaction wheel array as the final dynamic effector already. This is the standard way of representing the dynamic torques of spacecraft and provides the most control over the dynamics. In realistic satellite missions, reaction wheels are the most favourable and accurate way of attitude guidance. For example, take the following end of a software chain, as explained in some of the software chain operator guides.
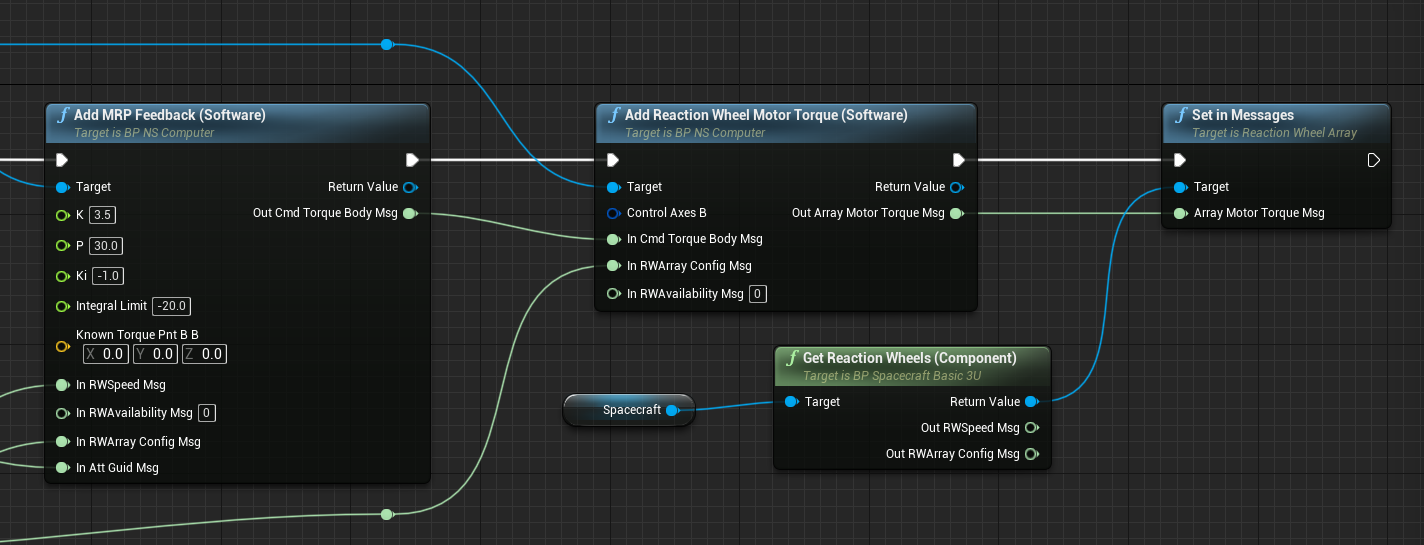
This is a common ending of the chain, which creates a Reaction Wheel Motor Torque Software and connects the output message to the reaction wheel array class. However, the final two nodes in this diagram can be swapped and replaced with an external force torque module. This can be done using the Spawn Actor method to create the External Force Torque module.
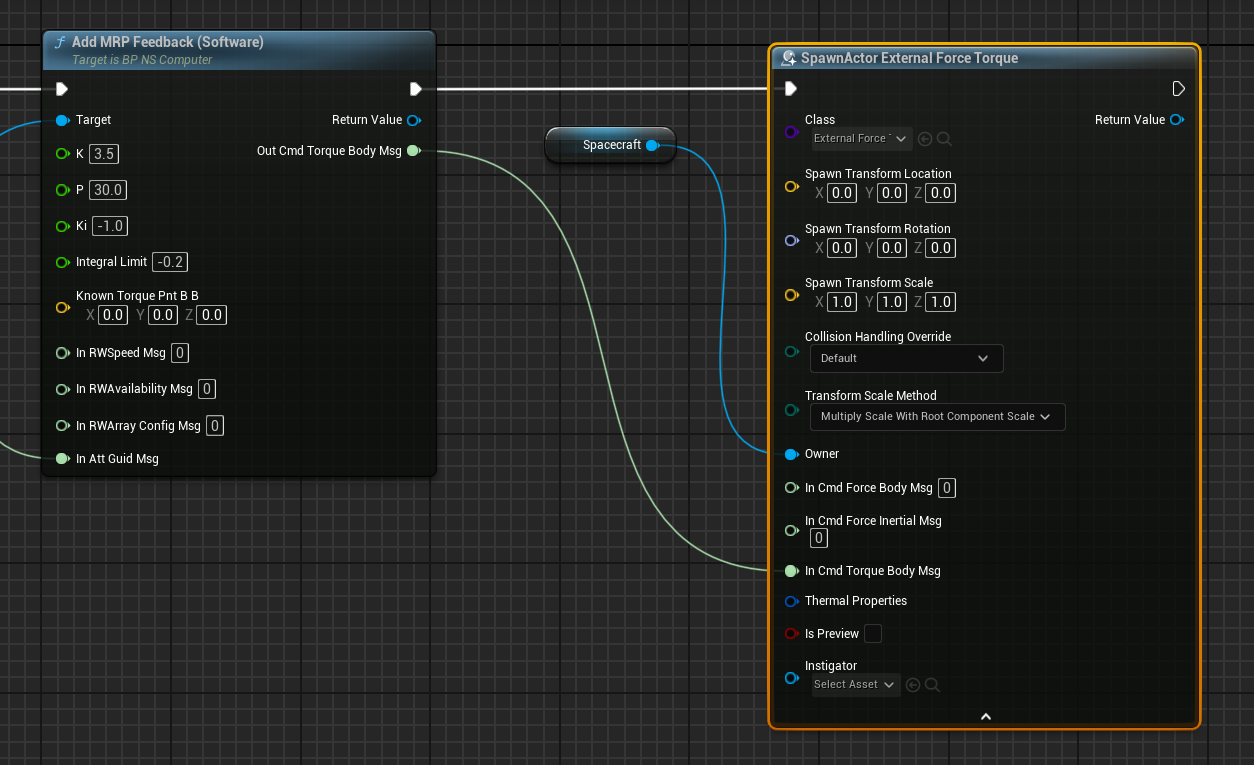
In this case, the Owner variable must be the spacecraft, as it needs to be attached to the spacecraft to work properly. The torque actor has no visual representation and simply acts as a dummy dynamic effector that can apply forces to the spacecraft. There are also a few different input message options available, for adjusting the inertial and body frame forces on the spacecraft if desired. In this case, only the torque is needed to be connected.
Once this is done, the MRP Feedback software module can have the reaction wheel input messages removed as well, leaving the values to 0, which means that the input messages do not exist.
Note
Although the reaction wheel array model is more realistic, using the external force torque effector should be able to recreate all flight software examples as required.