Dynamics: Magnetic Torque Bar
Description
The purpose of this model is to implement a magnetic torque bar (MTB) for use in an Attitude Determination & Control System (ADCS).
An MTB works by interacting with the Earth's magnetic field (\(\mathbf{B}\)). By controlling the current flowing through the MTB, the satellite can produce a magnetic dipole moment. This magnetic moment interacts with the Earth's magnetic field, creating a torque that causes the satellite to rotate.
The magnetic torque bar is used in conjunction with other components of the attitude control system, such as reaction wheels and thrusters, to adjust the orientation of the satellite. The combination of these components allows the satellite to maintain its desired attitude, or to change its orientation when necessary.
Example Use Cases
- Add MTB to ADCS: This module is used to add an MTB component to an ADCS. This can be used for pointing and/or momentum management (de-saturation).
Module Implementation
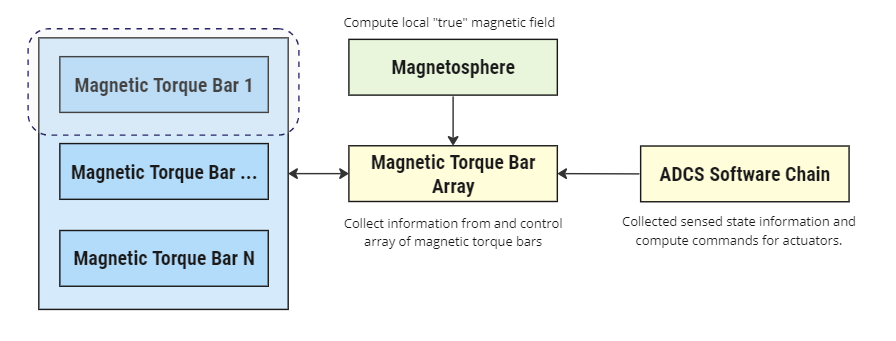
This module implements a single MagneticTorqueBar that is designed to work in conjunction with the MagneticTorqueBarArray module. At this stage, the Parent component of this object must be a MagneticTorqueBarArray.
Given a dipole command \(\mu_{cmd}\) this module will apply an external body frame torque about the spacecraft center of mass, calculated as:
where \([G_t]\) is the DCM that defines the orientation of the MTB in the body frame \(\mathcal{B}\). Prior to calculating \(\mu_B\), saturation limits based on the MTB configuration are applied to \(\mu_{cmd}\).
Assumptions/Limitations
- A key assumption here is that the MTB causes a modification of the spacecraft’s net magnetic field, and therefore the applied torque is at the spacecraft's centre of mass. This is not necessarily true, and a more detailed model might consider the application of the torque at the MTB location.