Data Downlink: Completing the Simulation
More Plots
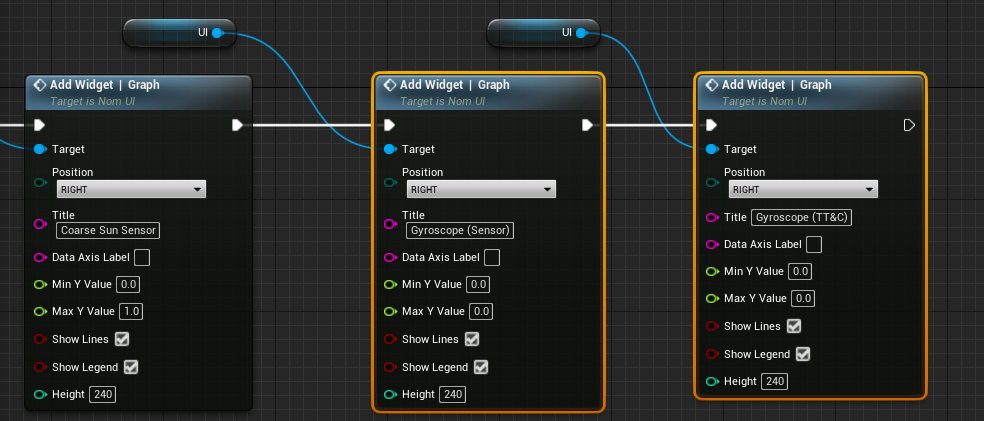
In the previous document, the data display for the CSS message from the sensor and the TT&C system was displayed on a graph widget. The same thing can be done for the gyroscope data. Instead of using a double data point, a double 3 data point can be used from the gyroscope data. A Double3 is a structure that has an X, Y and Z component. Since the graph will already display three data points, instead of putting both sensor and TT&C plots on the same graph, two separate graphs will be added to the configuration.
On the Tick event, a similar code can be made to receive the gyroscope message instead of the CSS message. This is done by creating a new IMU Gyroscope Message and updating the data within the message on the Receive Message blueprint function. The previous nodes for the receive function can be duplicated after the first section of the code.
Note
To copy multiple blueprint nodes, left-click and drag within the blueprint graph to select multiple nodes. Holding shift and clicking will add additional nodes to the selection while control and clicking will remove nodes from the selection. Press Control + C to copy the nodes and Control + V to paste them again.
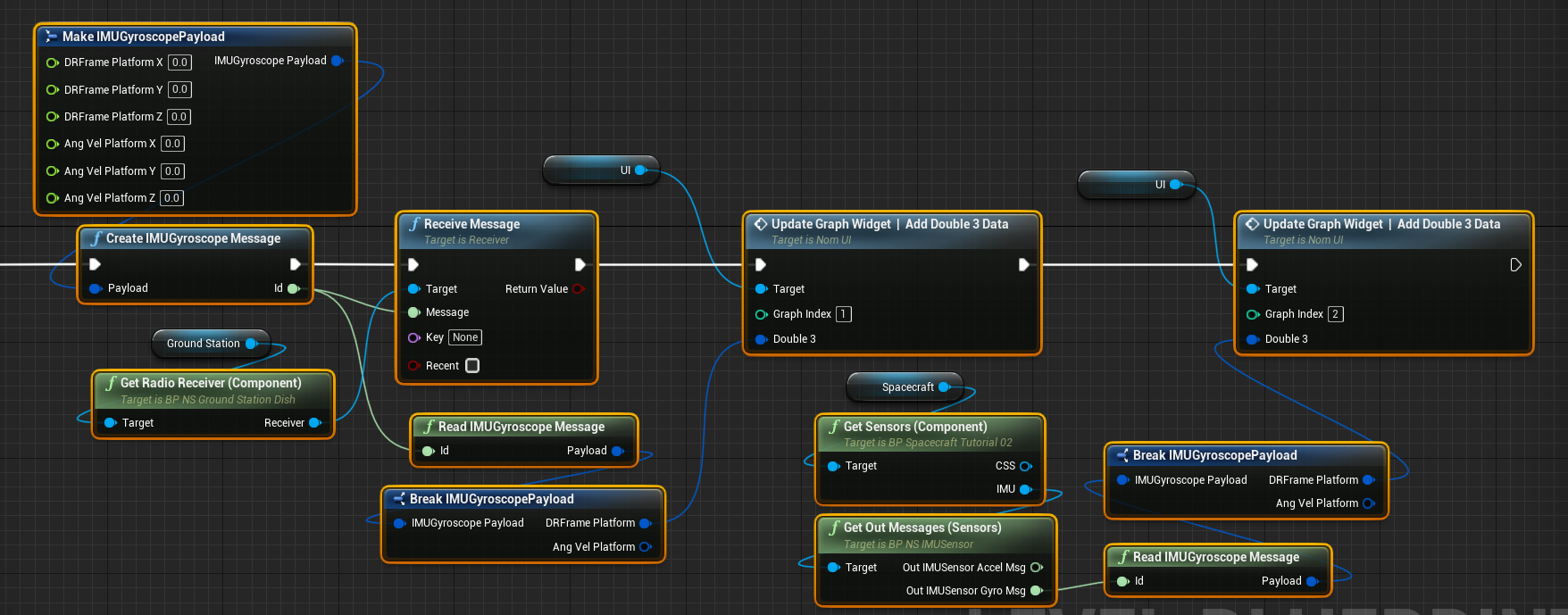
For the additional graph plotting, note the graph index. Since two need plots were added to display the sensor data, the indexes should be changed to 1 and 2 respectively.
Executing the Simulation
The event graph on the level blueprint should look something like the following:
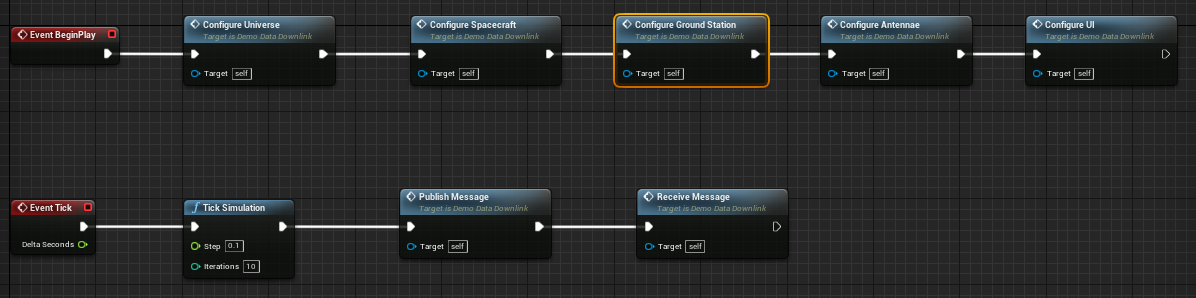
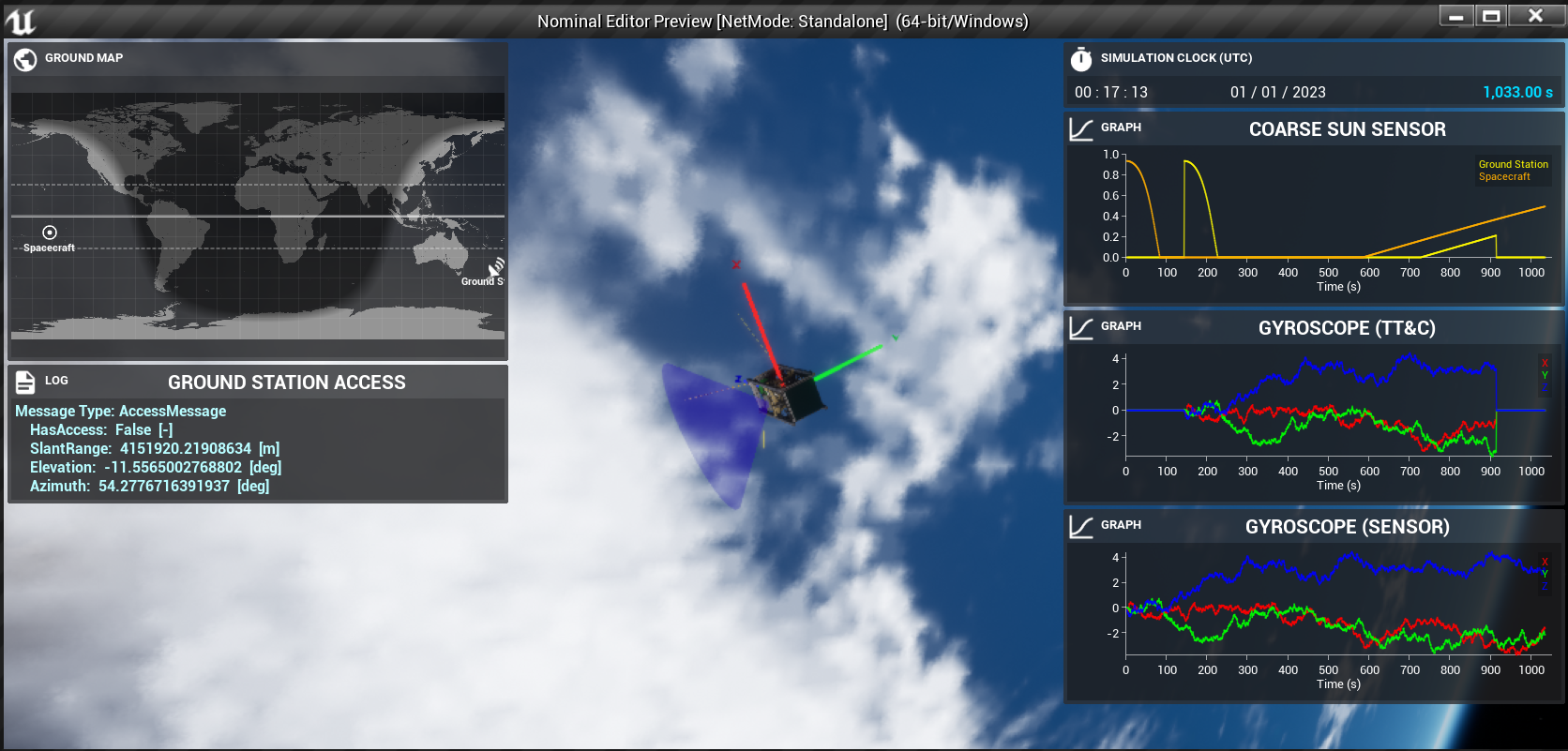
The tutorial is complete. When the tutorial is played, the spacecraft should rotate towards the Earth and transmit sensor data from a CSS and an IMU. The sensor data is transmitted from the transmitter to a ground station. The ground station then decodes the messages in order and plots the same data to the graphs on the screen, showing a delay between the real-time data and the received data.