Getting Started: Running Demos
Within the Content/Nominal/Demos directory in the Content Browser, a number of demos showing off the capability of Nominal Editor and the simulation platform are shown. These demos can be opened and edited. Demos are filtered by category, with each category containing a number of demo levels.
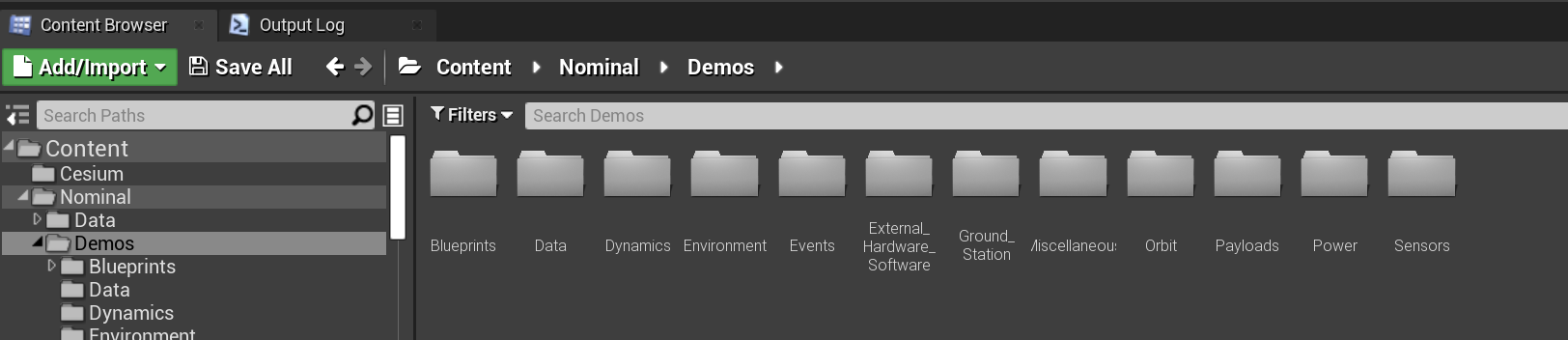
Within the folder, each demo shows off a particular set of features in the simulation program. The default one that opens when Unreal is launched is the Demo_SunPointing example. Some key demos of interest are:
Dynamics/Demo_AttitudeFeedbackReactionWheels: This demo shows off the reaction wheel stack and how a spacecraft with a particular flight software chain can use the reaction wheels to adjust the orientation.Dynamics/Demo_AttitudeFeedbackThruster: This demo shows off how a thruster stack can be configured to aid with spacecraft attitude control, given a particular flight software chain.Data/Demo_DataCustomTM: This demo shows off the telemetry system and showcases a spacecraft that is tracking a flight sensor data and downlinking the data to a ground station during a pass.Environment/Demo_EnvironmentPerturbations: This demo shows of some of the environment models, such as the magnetic field and atmosphere models. These environment models can affect the spacecraft’s orbit.Dynamics/Demo_MomentumManagement: This demos shows how a configured magnetic torque bar can be used to apply an additional torque when in a magnetic field to help with a saturated reaction wheel stack to achieve a pointing frame.Data/Demo_OperatingModes: This demo shows how commands can be uplinked to a spacecraft from a ground station that has a preconfigured database of different pointing modes that are executed at different times in the simulation.Power/Demo_PowerNetwork: This demo shows how an EPS power network can be configured with a number of components, each connected in series and parallel and recording current, voltage and power measurements.Sensors/Demo_SensorPlatform: This demo has a number of sensors on board the spacecraft that are tracking various environment and attitude control variables. The sensors can produce output data that can be saved to a CSV file.Data/Demo_SpacecraftToSpacecraftComms: This demo shows how a spacecraft can point towards another spacecraft and how messages can be communicated over the telemetry system.Orbit/Demo_Constellation: This demo shows off how to add multiple spacecraft in orbit around the Earth and other bodies. It demonstrates constellations using the map UI widget.
The External Hardware Software folder contains some external hardware and software configured demos that can showcase how to use MQTT, TCP and USB connections to manipulate demos during the simulation time.
The Blueprints folder contains all of the example Spacecraft, Ground Stations and other objects used within the demos. These are typical objects that should be used when constructing new levels for the first time as they have already been assembled and include the appropriate parts.

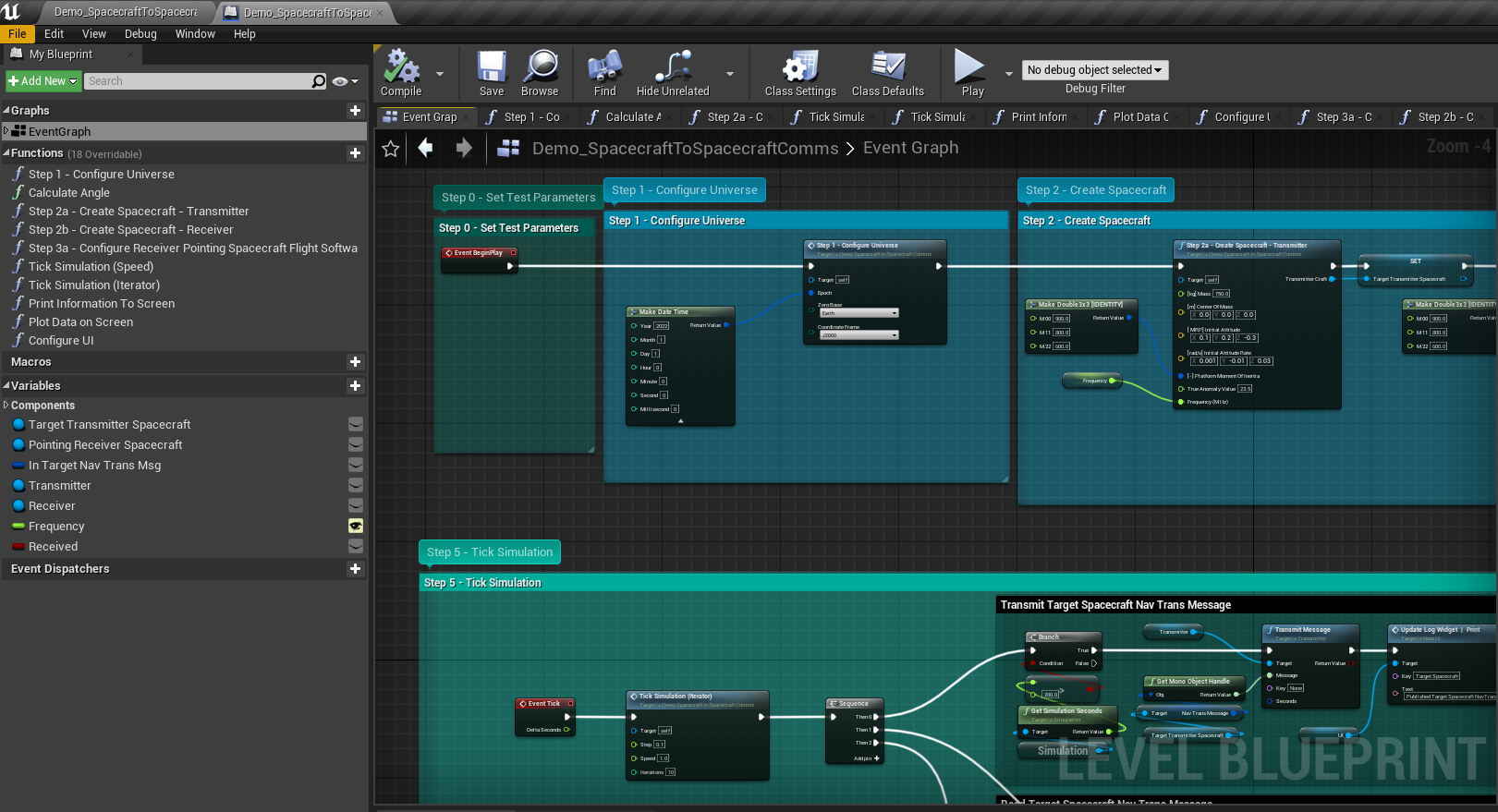
When a demo is opened (by double clicking on it in the content browser), the demo will be loaded into the scene. It is normal to have no objects present in the outliner panel before the play button has been hit. The level blueprint is the node graph that configures the demo and runs the simulation. To open up the level blueprint, hit the blueprints button in the tool bar and select Open Level Blueprint. A standard level blueprint graph will look something like the following: