Environment: Magnetic Field WMM
Description
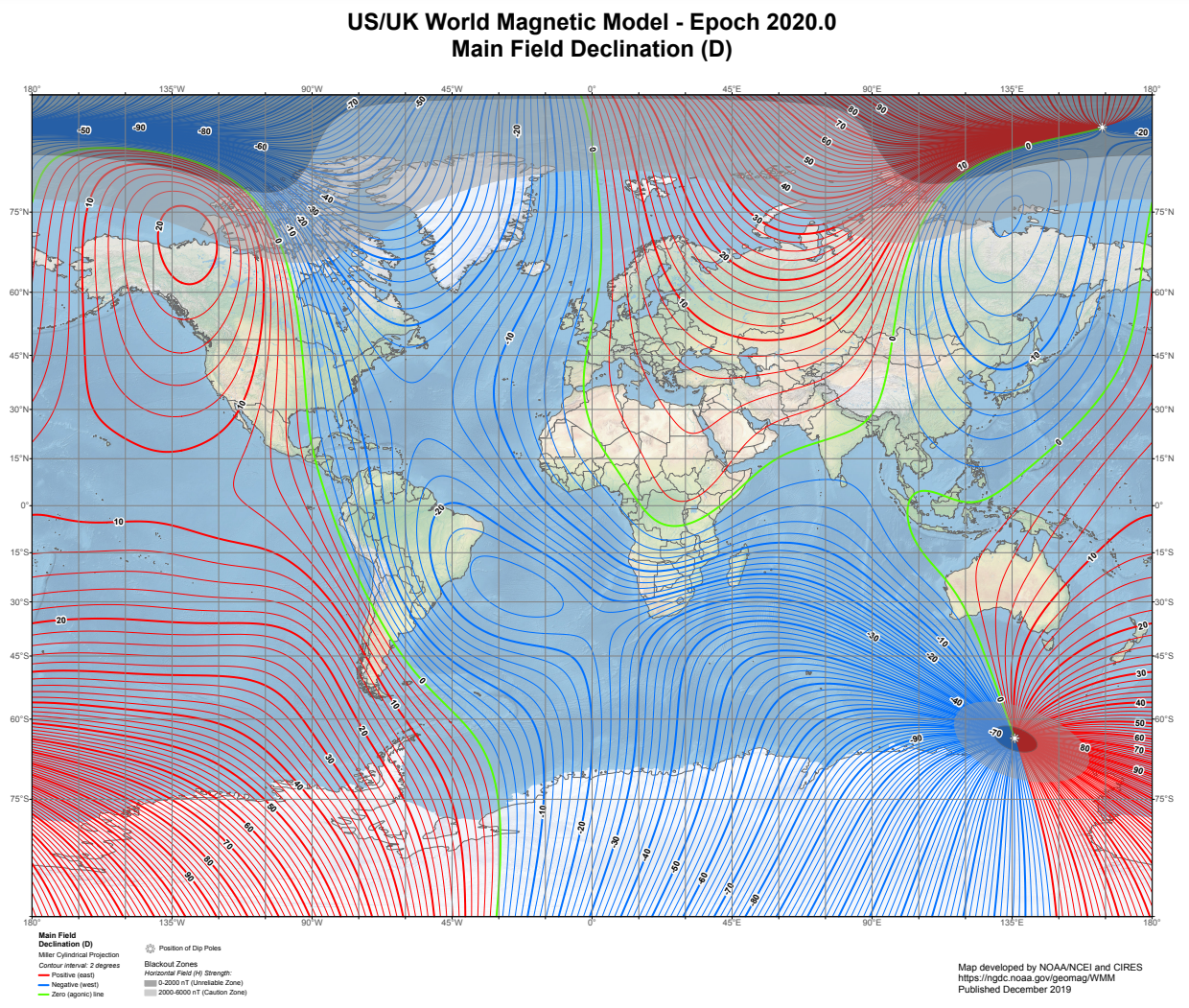
The Magnetic Field WMM (World Magnetic Model) module interfaces with an external library developed by National Oceanic and Atmospheric Administration (NOAA). The WMM module uses a 2020 dataset to produce the magnetic field vector at a specific geodetic location around the Earth. The WMM model is a large spatial-scale representation of the Earth’s magnetic field and uses an order 12-degree spherical harmonic expansion of the magnetic potential of the geomagnetic main field generated in the Earth’s core. The model also has 168 spherical-harmonic Gauss coefficients, that can be configured in the simulation or left as default with the standard values that were updated in December 2019.
Example Use Cases
- Simulate magnetorquers for desaturation of reaction wheels.
- Determine the magnetic field vector at unique locations in the orbit.
- Using a magnetometer for attitude control across a low-Earth orbit.
Module Implementation
The magnetic field rotates with an Earth-fixed frame \(P = \{\hat{p_1}, \hat{p_2}, \hat{p_3}\}\). The Earth-fixed frame has \(\hat{p_3}\) being the typical positive rotation axis and $\hat{p_1}$and \(\hat{p_2}\) span the Earth’s equatorial plane where \(\hat{p_1}\) points towards the prime meridian. The maximum and minimum reach values of the field can also be controlled by the input parameters for the field, capping the altitudes above the Earth’s surface within reach. Keeping these values as negative will provide an infinite field, with the tapering of the field determined by the mathematical model.
Let \(r_{B/P}\) be the spacecraft position vector relative to the planet centre (in the inertial frame origin \(O\)). Then, the planet-centric position vector can be computed with:
Let \([PN]\) be the direction cosine matrix that relates the rotating planet-fixed frame relative to the inertial frame \(N = \{\hat{n_1}, \hat{n_2}, \hat{n_3}\}\). The planet-centric position vector, which can be written in the Earth-fixed frame (ECEF), is then:
The WMM magnetic vector \({B}\) is a local North-East-Down (NED) frame \(M\)-frame. Let \(\phi\) and$\lambda$ be the local latitude and longitude of the spacecraft location relative to the ECEF frame \(P\). The DCM mapping from \(M\) to \(P\) is therefore:
The \({B}\) vector is mapped into \(N\)-frame components by returning:
Assumptions/Limitations
- The magnetic field vector is limited to an Earth-centric view and cannot be added to another planet.
- All spacecraft added to the simulation will be registering a magnetic field vector anywhere in the simulation. By default, unless a dynamic component is added, this will not affect the flight path or dynamics of the spacecraft.
- An Earth centred-dipole and a WMM field cannot be added simultaneously.
- The model is produced at 5-year intervals, with the current model expiring on December 31, 2024.
References
- Hanspeter Schaub and John L. Junkins. Analytical Mechanics of Space Systems. AIAA Education Series, Reston, VA, 4th edition, 2018.
- F. Landis Markley and John L. Crassidis. Fundamentals of Spacecraft Attitude Determination and Control. Springer, New York, 2014.
- Michael D. Grifin and James R. French. Space Vehicle Design. AIAA Education Series, Reston, VA, 2005.